October 16, 2024
Understanding the difference between structured, unified, and unstructured scan data with Prevu3D
When it comes to 3D scanning data, there are different kinds of point clouds, and understanding the differences between these types of data is crucial in order to provide Prevu3D with a dataset that can be processed into a 3D mesh model.
Why is it important to know the difference in scan data?
It’s important for EPCs (Engineering, Procurement, and Construction) or engineers to be familiar with scan file formats to help identify software compatibility.
Familiarity with file formats helps select suitable software for processing scan data to mesh a point cloud, aligning with project needs.
Recognizing distinctions between scan data types (unstructured, structured, unified) helps one comprehend software requirements and constraints.
Efficient collaboration across teams with different software preferences depends on the chosen scan data format. Structured data is useful for some workflows, but unified or unstructured formats may be better depending on project goals.
Structured scan data
Structured scan data contains the scan position and associated information. Points from the point cloud are typically linked to their corresponding scan stations. The same applies to 360° panoramic imagery captured from a tripod scan.
Scan locations are known because they are captured from a fixed position (tripod scans).
Includes both point clouds and 360° panoramic imagery captured from a tripod scan.
Highest density of points is preserved, as all raw data is maintained.
Typical data structure used for registered scans from tripod-based scanners.
Information such as normals or trajectories and imagery is needed to mesh a point cloud in Prevu3D.
This structured file format is required by Prevu3D to process Terrestrial scanner datasets.
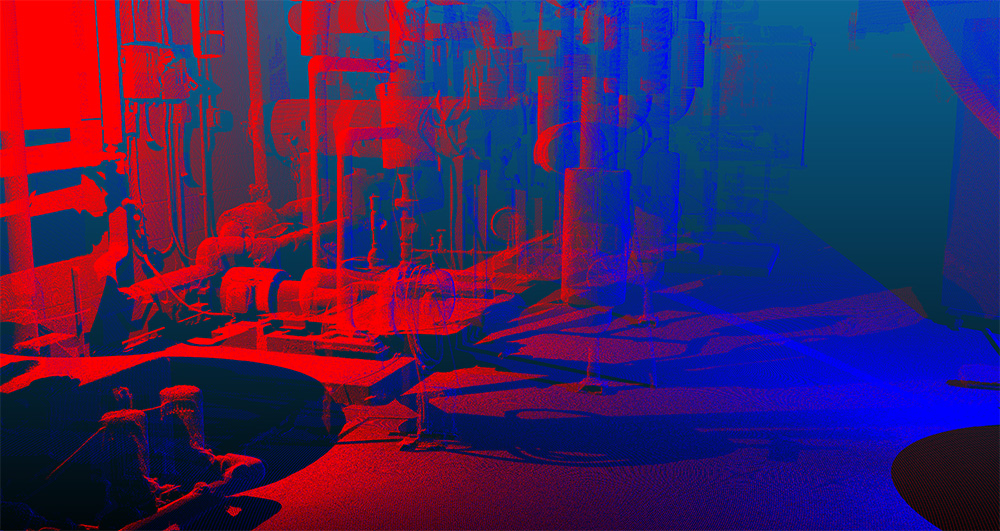
The image shows the structure of the scans, each of which is identifiable and includes these images and their corresponding points. To illustrate this, we’ve highlighted the points of scan #1 in blue and the points of scan #2 in red.
Why does Prevu3D require structured data?
Prevu3D needs the structured dataset because it includes all the station-related information, allowing us to leverage our industry-leading meshing engine. This format enables the computation of point cloud normals, which are essential for various processes—from filtering and meshing to texturing and creating photosphere navigation modes.
To learn how to create a structured E57 with your specific hardware and registration software, please refer to https://doc.prevu3d.com/saas/firstSteps, click on “Supported Scanners,” and select yours from the list.
If you need help generating a structured E57 file from these software applications, please email us at [email protected]. Other structured formats exist, but Prevu3D prefers E57.
Unified scan data
Unified scan data refers to merging all scans into a single point cloud, resulting in the loss of crucial station information. This process is similar to unstructured data, which no longer retains the original scan positions. Additionally, if they exist, 360° panoramic images will no longer have their positional data attached.
Many users opt for unified scan data to reduce file size and improve efficiency. However, this comes at a significant cost—valuable information is lost, potentially affecting compatibility with various software, including Prevu3D.
While unified scans are sometimes employed to create a lighter, more manageable version of the point cloud for specific workflows, caution is needed. It’s important to understand that unified data is a partial version of the original dataset and lacks the completeness of the structured format.
One critical drawback is that once a point cloud is unified, it cannot be converted back to a structured format. Therefore, users must weigh the benefits of reduced file size against the permanent loss of data and compatibility.

In the case of unfied, we can see that we are no longer able to make this disintction. The two stations are now merged into one, so the dots are all red.
Unstructured scan data
Unstructured point clouds are typically generated from data sources such as SLAM or mobile scanners, or from point clouds created via photogrammetry.
This data is considered “unstructured” because there are no scan positions associated with a depth map, as is the case with laser scanners on a tripod. It is quite similar to a “unified” point cloud.
If 360° panoramic imagery is collected using a SLAM scanner, additional information, such as image location and pose data, is required to align it with the point cloud. This information can be used for Photosphere generation and texturing.
Typically, normals can be included in the point cloud, or a trajectory can be exported. Prevu3D requires these valuable pieces of information.
Do more with your reality capture data
Understanding the differences between these types of scan data can help organizations make informed decisions about data management and analysis strategies to harness the full potential of 3D scanning technology.
Prevu3D offers a solution to centralize and manage your reality capture data on RealityPlatform™. Convert point clouds to textured meshes for easier, faster accessibility and richer visual context. Collaborate with stakeholders through a detailed 3D environment of your facility.