16 octobre 2024
Comprendre la différence entre les données de numérisation structurées, unifiées et non structurées avec Prevu3D
Lorsqu’il s’agit de données de numérisation 3D, il existe différents types de nuages de points, et il est essentiel de comprendre les différences entre ces types de données pour fournir à Prevu3D un ensemble de données qui peut être traité dans un modèle de maillage 3D.
Pourquoi est-il important de connaître la différence entre les données de numérisation?
Il est important que les EPC (Engineering, Procurement, and Construction) ou les ingénieurs soient familiarisés avec les formats de fichiers de numérisation afin d’identifier la compatibilité des logiciels.
- La connaissance des formats de fichiers permet de sélectionner le logiciel approprié pour traiter les données de numérisation afin d’obtenir un nuage de points, en fonction des besoins du projet.
- Reconnaître les distinctions entre les types de données de balayage (non structurées, structurées, unifiées) aide à comprendre les exigences et les contraintes du logiciel.
- Une collaboration efficace entre des équipes ayant des préférences logicielles différentes dépend du format de données de numérisation choisi. Les données structurées sont utiles pour certains flux de travail, mais les formats unifiés ou non structurés peuvent être plus appropriés en fonction des objectifs du projet.
Données de balayage structurées
Les données de balayage structurées contiennent la position du balayage et les informations associées. Les points du nuage de points sont généralement liés aux stations de balayage correspondantes. Il en va de même pour les images panoramiques à 360° capturées à partir d’un balayage sur trépied.
- Les emplacements des balayages sont connus parce qu’ils sont capturés à partir d’une position fixe (balayages à partir d’un trépied).
- Inclut des nuages de points et des images panoramiques à 360° capturées à partir d’un balayage sur trépied.
- La plus grande densité de points est préservée, car toutes les données brutes sont conservées.
- Structure de données typique utilisée pour les scans enregistrés à partir de scanners à trépied.
- Des informations telles que les normales ou les trajectoires et l’imagerie sont nécessaires pour mailler un nuage de points dans Prevu3D.
Ce format de fichier structuré est requis par Prevu3D pour traiter les jeux de données du scanner terrestre.
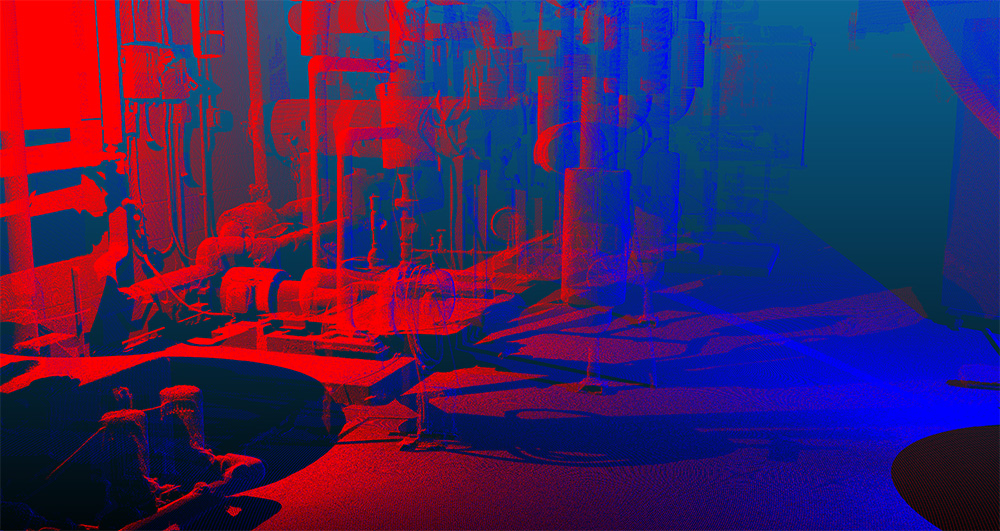
L’image montre la structure des scans, chacun d’entre eux étant identifiable et comprenant ces images et les points correspondants. Pour l’illustrer, nous avons mis en bleu les points du scan #1 et en rouge les points du scan #2.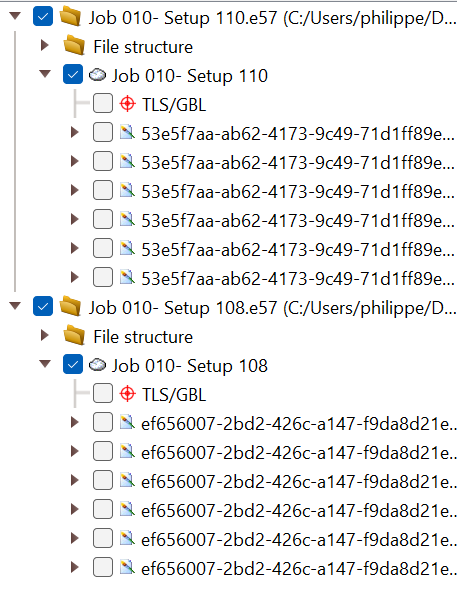
Pourquoi Prevu3D exige-t-il des données structurées ?
Prevu3D a besoin du jeu de données structuré parce qu’il comprend toutes les informations relatives à la station, ce qui nous permet de tirer parti de notre moteur de maillage de pointe. Ce format permet de calculer les normales des nuages de points, qui sont essentielles pour divers processus – du filtrage et du maillage au texturage et à la création de modes de navigation dans la photosphère.
Pour savoir comment créer un fichier E57 structuré avec votre matériel et votre logiciel d’enregistrement spécifiques, veuillez consulter le site https://doc.prevu3d.com/saas/firstSteps, cliquer sur « Scanners pris en charge » et sélectionner le vôtre dans la liste. Si vous avez besoin d’aide pour générer un fichier E57 structuré à partir de ces applications logicielles, veuillez nous envoyer un courriel à l’adresse [email protected]. Il existe d’autres formats structurés, mais Prevu3D préfère le format E57.
Données de balayage unifiées
L’unification des données de numérisation consiste à fusionner toutes les numérisations en un seul nuage de points, ce qui entraîne la perte d’informations cruciales sur les stations. Ce processus est similaire à celui des données non structurées, qui ne conservent plus les positions de numérisation d’origine. En outre, si elles existent, les images panoramiques à 360° n’auront plus leurs données de position attachées. De nombreux utilisateurs optent pour des données de numérisation unifiées afin de réduire la taille des fichiers et d’améliorer l’efficacité. Cependant, cela a un coût important : des informations précieuses sont perdues, ce qui peut affecter la compatibilité avec divers logiciels, y compris Prevu3D. Bien que les numérisations unifiées soient parfois utilisées pour créer une version plus légère et plus facile à gérer du nuage de points pour des flux de travail spécifiques, il convient d’être prudent. Il est important de comprendre que les données unifiées sont une version partielle de l’ensemble de données original et qu’elles n’ont pas l’exhaustivité du format structuré. Un inconvénient majeur est qu’une fois qu’un nuage de points est unifié, il ne peut pas être reconverti dans un format structuré. Les utilisateurs doivent donc évaluer les avantages de la réduction de la taille des fichiers par rapport à la perte permanente de données et de compatibilité.

Dans le cas d’unfied, nous pouvons voir que nous ne sommes plus en mesure de faire cette distinction. Les deux stations sont maintenant fusionnées en une seule, de sorte que les points sont tous rouges.

Données de numérisation non structurées
Les nuages de points non structurés sont généralement générés à partir de sources de données telles que les scanners SLAM ou mobiles, ou à partir de nuages de points créés par photogrammétrie. Ces données sont considérées comme « non structurées » parce qu’aucune position de balayage n’est associée à une carte de profondeur, comme c’est le cas avec les scanners laser sur trépied. Elles s’apparentent à un nuage de points « unifié ». Si des images panoramiques à 360° sont collectées à l’aide d’un scanner SLAM, des informations supplémentaires, telles que la localisation de l’image et les données de pose, sont nécessaires pour les aligner sur le nuage de points. Ces informations peuvent être utilisées pour la génération de photosphères et le texturage. Généralement, les normales peuvent être incluses dans le nuage de points ou une trajectoire peut être exportée. Prevu3D a besoin de ces informations précieuses.
Faites plus avec vos données de capture de la réalité
Comprendre les différences entre ces types de données de numérisation peut aider les organisations à prendre des décisions éclairées sur les stratégies de gestion et d’analyse des données afin d’exploiter tout le potentiel de la technologie de numérisation 3D. Prevu3D propose une solution pour centraliser et gérer vos données de capture de la réalité sur RealityPlatform™. Convertissez des nuages de points en maillages texturés pour une accessibilité plus facile et plus rapide et un contexte visuel plus riche. Collaborez avec les parties prenantes grâce à un environnement 3D détaillé de votre installation.
{kind=link}